安全警示及使用注意事项
请在使用本产品前仔细阅读本手册,未经授权的操作会导致错误或意外。制造商对因错误操作而导致设备出现的任何问题均不负责。
- 避免热插拔设备接口。
- 要正确关闭电源,请先关闭Ubuntu系统,然后再切断电源。由于Ubuntu系统的特殊性,在Nvidia的开发板上,如启动未完成的时候强行断电,会有0.03%的概率出现异常,进而导致设备无法启动。由于使用Ubuntu系统,米文的设备上也会存在同样的问题。
- 请勿使用本手册提及以外的线缆。
- 避免在强磁场环境下使用本设备。
- 长期不使用及运输前需要对数据进行备份。
- 推荐使用原包装进行运输。
- 警告! 此为A级产品,在生活环境中,该产品可能会造成无线电干扰。在这种情况下,可能需要用户对干扰采取切实可行的措施。
若使用电源适配器供电,则应该购买使用获CCC认证并满足标准要求的电源适配器。
服务与支持
技术支持
如果您遇到问题,或者您认为您的产品有缺陷,请发问题到email: helpdesk@miivii.com,我们将帮助您解决问题。也可访问米文技术论坛http://forum.miivii.com,搜索我们的知识库,以查找常见问题的解决方案。
保修
保修期:米文设备保修期为自购买之日起一年。 保修条例:保修期内产品,若出现非人为损坏的故障米文将进行免费保修。请联系helpdesk@miivii.com获取保修协助。
产品清单
-EVO Xavier x 1
-电源配适器 x 1
-电源转接线 x 1
-扩展安装部件 x 2
-安装螺丝 若干
-DIO 扩展插头 x 2
-快速上手指南及保修卡 x 1
-合格证 x 1
产品目录
产品介绍
米文EVO Xavier是一款专为工业场景设计的嵌入式边缘计算设备。它搭载的NVIDIA® Jetson AGX Xavier能够以30W的低功耗提供高达 30Tops的算力。EVO Xavier采取高效能的被动散热设计,可以在苛刻的工业环境中稳定正常工作。同时鉴于其紧固的嵌入式设计,可以达到很高的抗振等级。 EVO Xavier提供了丰富的I/O功能,特别为工业视觉场景提供了PoE+与隔离DI/DO等接口,可以满足多种专用传感器的接入需求。同时EVO Xavier还在内部设计了多种扩展接口,提供更多通讯以及存储扩展方案。

产品特性
高效直触式被动散热
IP5X防护等级满足工业场景需求
4路千兆PoE+接口,支持IEEE 802.3at协议
高抗振等级
-20℃-60℃工作温度
丰富的接口与可扩展性
产品外观
正视图 Front view | 侧视图 Side view |
|---|---|
|
|
| 俯视图 Top view | 后视图 rear view |
|
|

产品规格
处理器模组 Processor
Specification | |
|---|---|
Processor | NVIDIA Jetson AGX Xavier |
| AI Performance | Up to 32T OPS |
| CPU | 8-core ARM v8.2 64-bit CPU |
| GPU | 512-core Volta GPU |
| Memory | 32GB 256-Bit LPDDR41 |
| DL Accelerator | 2×NV DLA Engines |
| Storage | 32GB eMMC 5.1 |
| Video Encode | 4x 4Kp60 4x 4Kp60 |
| Video Decode | 2x 8Kp30 4x 4Kp60 |
1
Jetson AGX Xavier DRAM内存规格由16GB提升到32GB。
接口 I/O
| Interface | Quantity | Note | |
| Function KEY | Power Button | 1 | |
| Recovery Button | 1 | ||
| Network/Camera | Ethernet | 1×Gigabit Port 4×PoE+ Gigabit Port | IEEE 802.3 at PoE+ 25.5W |
| Video output | HDMI | 1×HDMI 2.0 TYPE A | 5V 1A |
| USB | USB | 3×USB 3.1 gen1 TYPE A 1×USB 2.0 TYPE A | USB 5V, 1A USB 2.0 Flashing Port |
| I/O | UART | 2xRS232 2xRS485 1xTTL | DB9 Terminal TTL 3.3V for GPS Function |
| CAN | 2 | Two CAN in One DB9 Terminal With CAN chip, terminal resistor 120Ω | |
| GPIO | 8xIsolated DI 8xIsolated DO | DI 3.3-50V DC DO 5-40V DC | |
| User Expansion | TF Socket | 1xTF Slot | MicroSD card supported |
| M.2 | 1×M.2 M Key | 2280 SIZE NVME SSD | |
| Mini PCle | 2 | ||
| Nano SIM Socket | 2 | For Nano SIM Card |
供电 Power Supply
Power Supply | Spec |
|---|---|
| Input Type | DC |
| Input Voltage | Wide input 14-48V (Optional) 24-48V for PoE |
| Typical consumption | 50W |
结构 Mechanical
Mechanical | Spec |
|---|---|
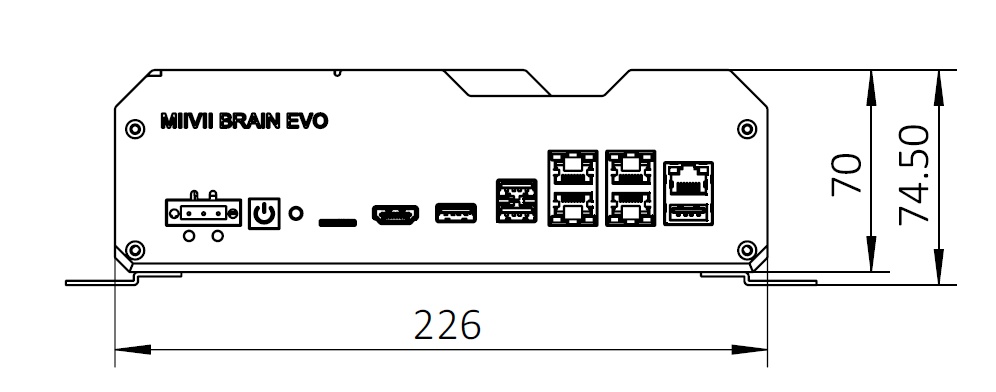
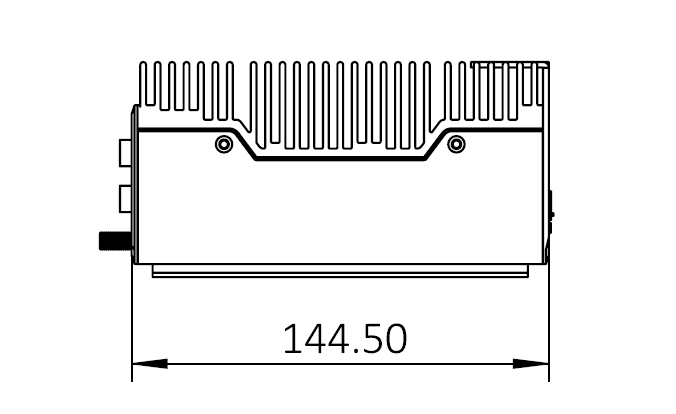
| Dimensions (W×H×D) | 226mm×70mm×144.5mm (I/O ports and mounting holes excluded) |
| Weight | 2.3Kg |
环境 Environmental
Environmental | Spec |
|---|---|
Environmental | Spec |
| Operating Temperature | -20℃-60℃, 0.2~0.3m/s air flow2 |
| Storage Temperature | -25℃-80℃ |
| Storage Humidity | 10%-90% non-condensing |
| Vibration | 5gn,10Hz~150Hz,3 Axis3 |
| Protection | IP5X |
| ESD | Touch 4KV, Air 8KV |
| TVS | 500V |
认证 Certification
Certification | Status |
|---|---|
| CCC, CE, FCC, RoHS, SRRC | Processing |
[1] Jetson AGX Xavier DRAM内存规格由16GB提升到32GB。
[2] According to GB/T 2423-2008 60℃以上运行时,运行频率降低 Working frequency is subject to change after temperature reaches 60℃
[3] According to GB/T 2423.10-2008
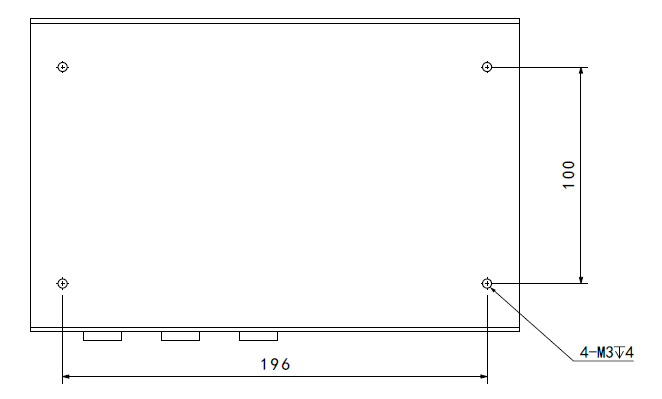
EVO Xavier主体尺寸及安装孔位尺寸如图:
Dimensions and mounting hole position as below:
俯视图 Up view(Unit:mm) |
|---|
|
| 主视图 Front view(Unit:mm) |
|
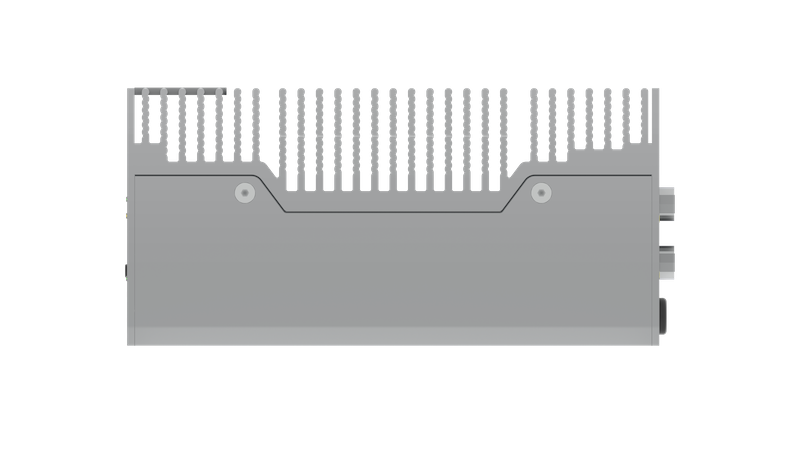
| 左视图 Left view(Unit:mm) |
|
| 安装孔位图1 Mounting Hole(Unit:mm) |
|
| 安装孔位图2 Mounting Hole(Unit:mm) |
|
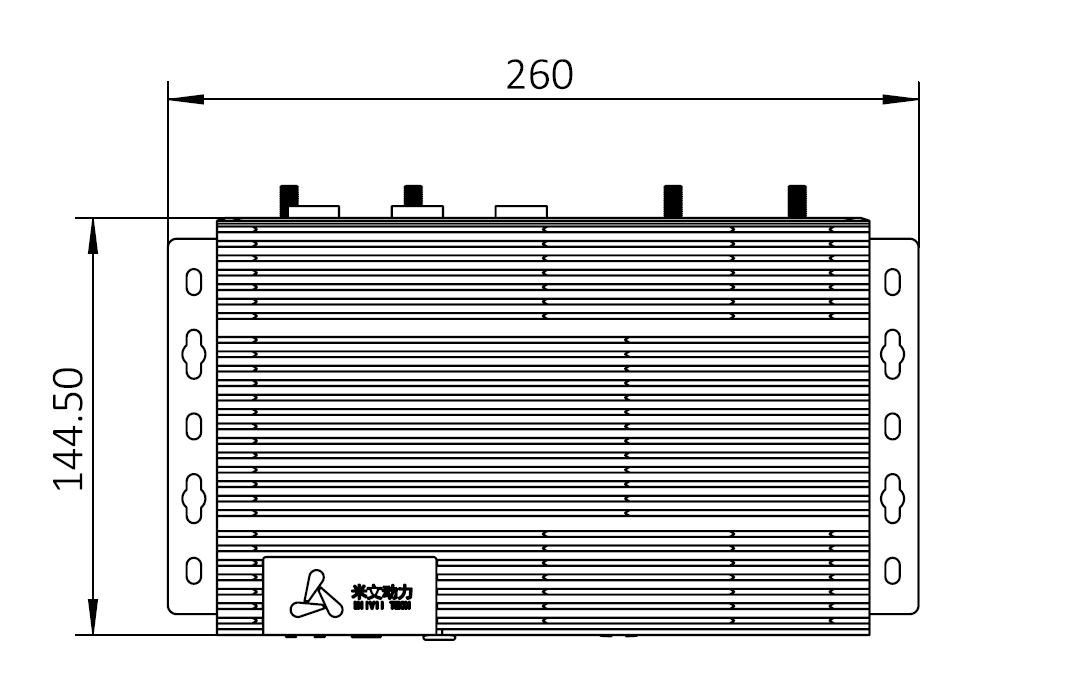
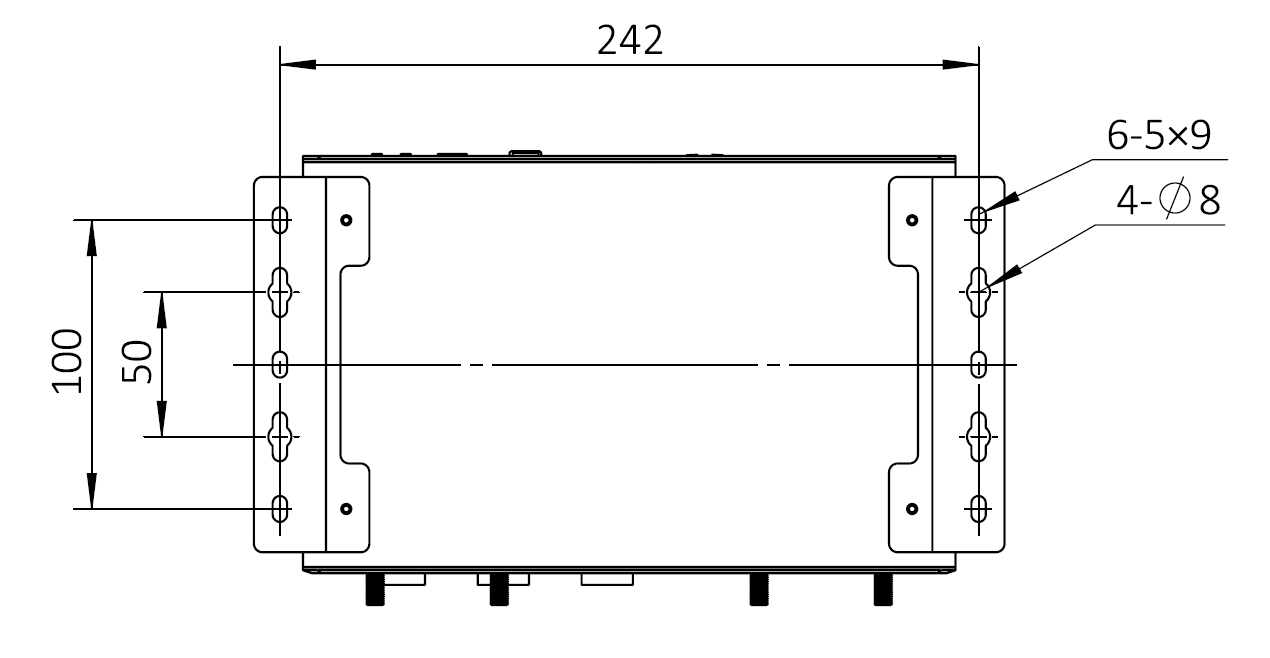
若需要将米文设备安装在其他设备上,请先安装附件中的安装固定板
|
|---|
| 图 安装固定板示意图 |
通过安装固定板上的孔位,根据实际情况将米文设备固定到其他设备上
|
|---|
| 图 EVO Xavier固定示意图 |

章节一:设备接口说明
接口说明
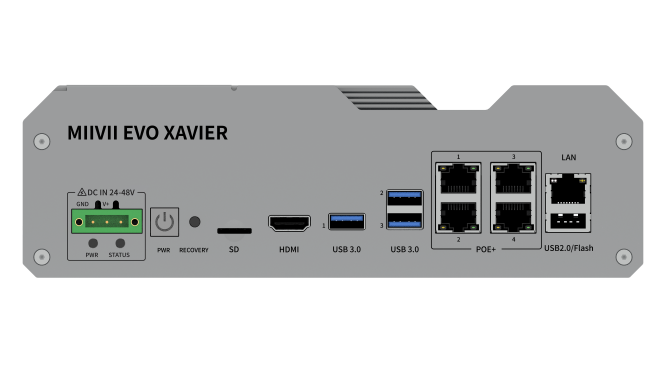
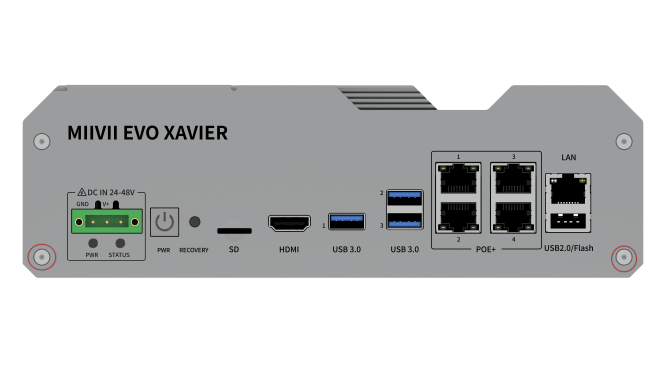
正面接口
|
|---|
| 图 EVO Xavier正面接口示意图 |

接口 | 接口名称 | 接口说明 |
|---|---|---|
| DC IN | 电源接口 | 输入电源14V~48V |
| PWR_LED | 电源指示灯 | 载板上电:指示灯为黄色 载板启动:指示灯为白色常亮 载板错误:指示灯为红色常亮 |
| STATUS | 系统状态指示灯 | 系统启动前:指示灯为红色 系统启动后:指示灯为蓝色常亮 |
| PWR_Button | 电源按钮 | |
| RECOVERY | Recovery模式按钮 | 按下后上电开机,可以进入Recovery模式 |
| SD | TF卡槽 | 可以扩展TF卡 3.3V 1A |
| HDMI | HDMI接口 | HDMI 2.0 TYPE A 5V 1A |
| USB 3.1×3 | USB 3.1 gen1接口 | 三个USB3.1 gen1接口 5V 1A |
| PoE+×4 | PoE+ 接口 | 千兆IEEE 802.3at PoE+ 25.5W |
| LAN×1 | 以太网接口 | 千兆以太网接口,RJ45 |
| USB 2.0 | USB 2.0接口 | 一个独立USB2.0接口,可作为烧写接口 5V 1A |
网口使用说明:
MIIVII EVO XAVIER 共有5个网口,其中LAN口为普通千兆网口,其余四个网口为POE供电端口(PSE)
1、当外接设备为非POE功能的交换机或路由器时,建议您使用普通千兆网口
2、当您需要对外接支持POE功能的设备(如POE相机)时,可连接POE端口进行供电
POE操作说明,镜像4.5-3.3.1.7及以上, 4.6.1-4.3.0.43及以上的版本默认POE关闭,如需要使用POE功能,可通过以下方式将POE功能开启
1、通过以下命令行打开poe-control.sh脚本
sudo vim /usr/local/bin/poe-control.sh
2、修改Poe_enable参数,1为默认开启,0为默认关闭
3、保存退出
4、重启设备,POE端口默认打开关闭功能修改成功
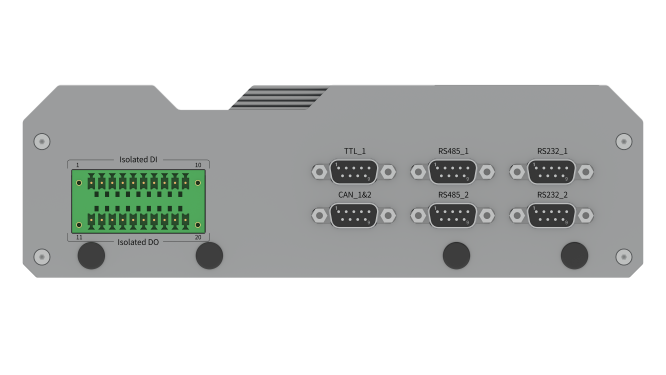
背面接口
|
|---|
| 图 EVO Xavier背面接口示意图 |
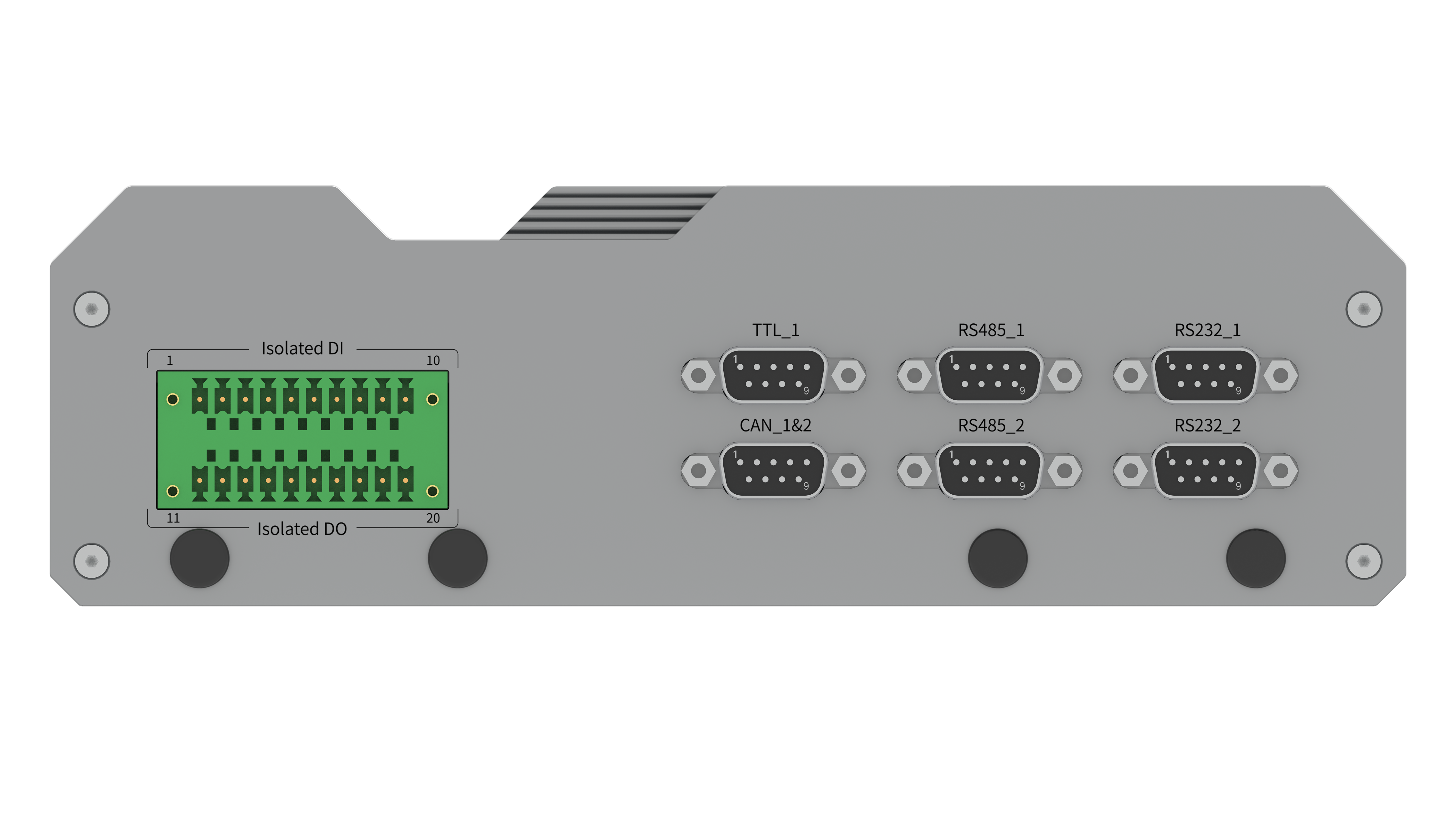
接口 | 接口名称 | 接口说明 |
|---|---|---|
| DI | 隔离DI接口 | DI 3.3V~50V DC |
| DO | 隔离DO接口 | DO 5V~40V DC |
| TTL_1 | TTL串口1号 | 3.3V@10mA Max,带有GPS同步功能 |
| CAN_1&2 | CAN接口1号及2号 | 包含两路CAN信号 7.5V Max@48mA Max 带有CAN芯片,终端电阻120Ω |
| RS485_1 | RS485串口1号 | 差分输出驱动电压 2.0VDC Min,驱动A电流1mA Max |
| RS485_2 | RS485串口2号 | 同上 |
| RS232_1 | RS232串口1号 | 逻辑1: -3V~-12V,逻辑0: 3V~12V,电流1.6mA Max |
| RS232_2 | RS232串口2号 | 同上 |
章节二 :GPIO接口定义及配置方法
GPIO 接口信号定义
|
|---|
| 图 DI/DO接口序号图 |
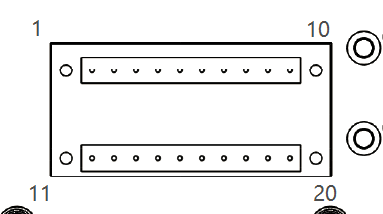
| 接口名称 | 引脚序号 | 信号定义 | GPIO Chip | 接口说明 |
| DI | 1 | DI_0 | 240 | DI_0输入 |
| 2 | DI_1 | 241 | DI_1输入 | |
| 3 | DI_2 | 242 | DI_2输入 | |
| 4 | DI_3 | 243 | DI_3输入 | |
| 5 | GND_GIN | GND | 地 | |
| 6 | DI_4 | 244 | DI_4输入 | |
| 7 | DI_5 | 245 | DI_5输入 | |
| 8 | DI_6 | 246 | DI_6输入 | |
| 9 | DI_7 | 247 | DI_7输入 | |
| 10 | GND_GIN | GND | 地 | |
| DO | 11 | DO_0 | 232 | DO_0输出 |
| 12 | DO_1 | 233 | DO_1输出 | |
| 13 | DO_2 | 234 | DO_2输出 | |
| 14 | DO_3 | 235 | DO_3输出 | |
| 15 | GND_GOUT | GND | 地 | |
| 16 | DO_4 | 236 | DO_4输出 | |
| 17 | DO_5 | 237 | DO_5输出 | |
| 18 | DO_6 | 238 | DO_6输出 | |
| 19 | DO_7 | 239 | DO_7输出 | |
| 20 | GND_GOUT | GND | 地 |
GPIO接口配置方法
对GPIO接口使用的示例如下,请将< >中的信息修改为想要调整的GPIO节点号,具体对应关系请参考【接口说明】部分
# 切换到root用户 sudo su - # 设置为高电平(DO) echo 1 > /sys/class/gpio/<gpio339>/value # 设置为低电平(DO) echo 0 > /sys/class/gpio/<gpio339>/value # 读取数据(DI) cat /sys/class/gpio/<gpio339>/value
若需要关机后保留配置,可以将以上命令写入/etc/rc.local 文件
米文设备GPIO输出模式说明
DO输出模式 | 模式说明 | 对应米文设备 |
|---|---|---|
| 开漏输出 | 不输出电压,控制输出低电平时引脚接地,控制输出高电平时引脚既不输出高电平,也不输出低电平,为高阻态。如果外接上拉电阻,则在输出高电平时电压会拉到上拉电阻的电源电压。设置为高电平时,DO脚与外接的电压相同(0-40V); 设置为低电平时,DO脚为地 | Evo Xavier |
| 推挽输出 | 内部自带负载电阻,可以稳定输出电平信号。高电平时,DO脚稳定输出3.3V电压,低电平时,DO脚输出为0V。推挽输出最大支持电流为10mA。 | Apex Xavier,Apex Xavier II系列 Evo TX2 GMSL2 Lite NX Mini,Lite TX2 NX Mini,Lite Nano Mini |
注:开漏输出推荐上拉电阻表
目标上拉电压(V) | 3.3 | 5 | 12 | 15 | 24 | 36 | 40 |
|---|---|---|---|---|---|---|---|
| 推荐上拉电阻值(Ω) | 500 | 1k | 2k | 3k | 5k | 10k | 10k |
章节三:TTL接口定义及GPS对设备授时使用方法
TTL接口信号定义
|
|---|
| 图 TTL接口序号图 |
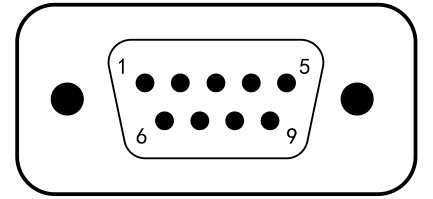
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 | 设备节点 |
| TTL_1 | 1 | GNDSY | SYNC地信号,与普通地信号隔离 | ttyUART_TTL_1 |
| 2 | TTL1_RX_3V3 | TTL_1接收 | ||
| 3 | TTL1_TX_3V3 | TTL_1发送 | ||
| 4 | NC | 空脚 | ||
| 5 | GND | 地 | ||
| 6 | SYNCIN_GPIO8_EXT | 同步输入信号 | ||
| 7 | TTL1_RTS_3V3 | TTL1发送请求 | ||
| 8 | TTL1_CTS_3V3 | TTL1发送清除 | ||
| 9 | NC | 空脚 |
若需要使用GPS外部授时功能,接线方案如下:
GPS的NMEA输出串口对接EVO Xavier的TTL_1硬件串口(串口波特率为9600),映射到Linux系统为/dev/ttyUART_TTL_1设备节点。
GPS的pps秒脉冲输出信号线对接EVO Xavier的SYNCIN_GPIO8_EXT管脚,映射到Linux系统为/dev/miivii-sync-in设备节点。
在GPS授时模式下,如上两个节点会被后台GPS授时处理程序占用。请勿对这两个节点进行其他操作,否则GPS授时功能会被打断。
GPS 对设备授时使用方法
GPS对设备授时功能优点:设备通过GPS设备从GPS卫星上获取当地标准的时间信号,从而精准定位设备时间。
GPS支持型号
支持GPS品牌型号:所有符合GPRMC数据标准格式输出的GPS设备,且必须要有PPS秒脉冲输出的GPS设备。
授时功能配置
在初次接入GPS时需要在MiiVii Setting配置软件中进行系统配置,将Sync Mode选项配置成GPS模式,重启系统。MiiVii Setting具体方法请参考“米文配置软件介绍”部分。
检查授时是否成功
修改系统时间,输入命令
sudo date -s "2018-10-1"
等待2~3s,查看当前时间,输入命令
date
若显示时间为:“2018-10-1”,说明授时失败
若显示时间为:“当前时间”,说明授时成功
故障排查
若授时失败,需进行故障排查
1.查看GPS是否有输出
输入命令
cat /dev/ttyTHS1
终端收到带有GPRMC字段的输出,例如:
GPRMC,014600.00,A,2237.496474,N,11356.089515,E,0.0,225.5,310518,2.3,W,A*23
2.查看GPS的pps信号是否有输出
输入命令
hexdump /dev/miivii-sync-in-a
终端有十六进制的数据输出,例如:
0000400 02fe 9f40 490e 562d 1647 004e 0000 0000
3.识别方法
如果以上"1"&"2"没有输出,说明GPS工作不正常,可以把GPS放到窗外或是到户外测试,或更换GPS进行测试
如果"1"&"2"输出正常,检查MiiVii Setting配置是否为GPS模式,如果不是,更改模式后重新启动
执行以上操作之后,GPS授时依然不成功,输入命令
hexdump /dev/miivii-sync-out
终端有十六进制的数据输出,例如:
0000400 02fe 9f40 490e 562d 1647 004e 0000 0000
如果没有数据输出,可能是没有用匹配的刷机工具和镜像刷机,建议检查镜像和刷机工具重新刷机
如果有数据输出,可能是设备硬件问题,建议联系售后维修处理
章节四:CAN口定义及配置方法
CAN接口信号定义
|
|---|
| 图 CAN接口序号图 |
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
| CAN_1&2 | 1 | CAN1_L | CAN_1 L端 |
| 2 | CAN0_L | CAN_0 L端 | |
| 3 | GND | 地 | |
| 4 | GND | 地 | |
| 5 | NC | 空脚 | |
| 6 | GND | 地 | |
| 7 | CAN0_H | CAN_0 H端 | |
| 8 | CAN1_H | CAN_1 H端 | |
| 9 | NC | 空脚 |
CAN口配置方法
CAN10设备具体使用方法,参考https://github.com/linux-can/can-utils中的cansend.c和candump.c
测试命令:
sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan sudo ip link set can0 type can bitrate 500000 sjw 4 berr-reporting on loopback off sudo ip link set up can0 sudo cansend can0 123#abcdabcd sudo candump can0 sudo ip -details -statistics link show can0 sudo ifconfig can0 down
CAN FD配置使用方法:
sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan sudo ip link set can0 type can bitrate 500000 sjw 4 dbitrate 2000000 dsjw 4 berr-reporting on fd on sudo ip link set up can0 sudo cansend can0 213##011
[10] CAN FD和CAN 2.0的区别:
1)
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on
其中bitrate为can2.0模式下的波特率; dbitrate为can fd模式下的波特率,根据官方文档,这个值最大可配置为5M,一般应用最好采用2M;
2)
sudo cansend can0 213##011
发送命令中,id与数据之间多了一个#,并且##后的第一个字节(0)为canfd_frame.flags的值,范围为0~F; canfd_frame.flags后面的字节(11)为第一个数据,一次最多可以传输64个字节。
章节五:UART接口定义及配置方法
RS485接口信号定义
|
|---|
| 图 RS485接口序号图 |
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 | 设备节点 |
| RS485_1 | 1 | NC | 空脚 | ttyUART_485_1 |
| 2 | UART1_485A | RS485_1号A端 | ||
| 3 | UART1_485B | RS485_1号B端 | ||
| 4 | NC | 空脚 | ||
| 5 | GND | 地 | ||
| 6-9 | NC | 空脚 | ||
| RS485_2 | 1 | NC | 空脚 | ttyUART_485_2 |
| 2 | UART2_485A | RS485_2号A端 | ||
| 3 | UART2_485B | RS485_2号B端 | ||
| 4 | NC | 空脚 | ||
| 5 | GND | 地 | ||
| 6-9 | NC | 空脚 |
RS232接口信号定义
|
|---|
| 图 RS232接口序号图 |
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 | 设备节点 |
| RS232_1 | 1 | NC | 空脚 | ttyUART_232_1 |
| 2 | UART1_RX_232 | RS232_1号接收 | ||
| 3 | UART1_TX_232 | RS232_1号发送 | ||
| 4 | NC | 空脚 | ||
| 5 | GND | 地 | ||
| 6-9 | NC | 空脚 | ||
| RS232_2 | 1 | NC | 空脚 | ttyUART_232_2 |
| 2 | UART2_RX_232 | RS232_2号接收 | ||
| 3 | UART2_TX_232 | RS232_2号发送 | ||
| 4 | NC | 空脚 | ||
| 5 | GND | 地 | ||
| 6-9 | NC | 空脚 |
UART接口配置方法
打开/dev/(folder)下面对应的设备节点,设置波特率,停止位,奇偶校验位,数据位等。可以使用stty命令配置串口的波特率,停止位,奇偶校验位,数据位等,详细见stty命令说明。
命令示例,请将< >中的信息修改为想要调整的串口节点号,具体对应关系请参考【接口说明】部分
sudo stty -F /dev/<UART_XXX> speed 115200 cs8 -parenb -cstopb -echo
输出数据测试
sudo echo “miivii tty debug” > /dev/<UART_XXX>
使用下面命令接收输入数据
sudo cat /dev/<UART_XXX>
章节六:Debug接口说明
Debug接口位置
米文EVO Xavier的Debug(RS232)接口位于载板背面,具体位置如图。其中PIN 8为RX引脚,PIN 10为TX引脚
|
|---|
| 图 Debug接口位置 |

|
|---|
| 图 Debug接口序号图 |
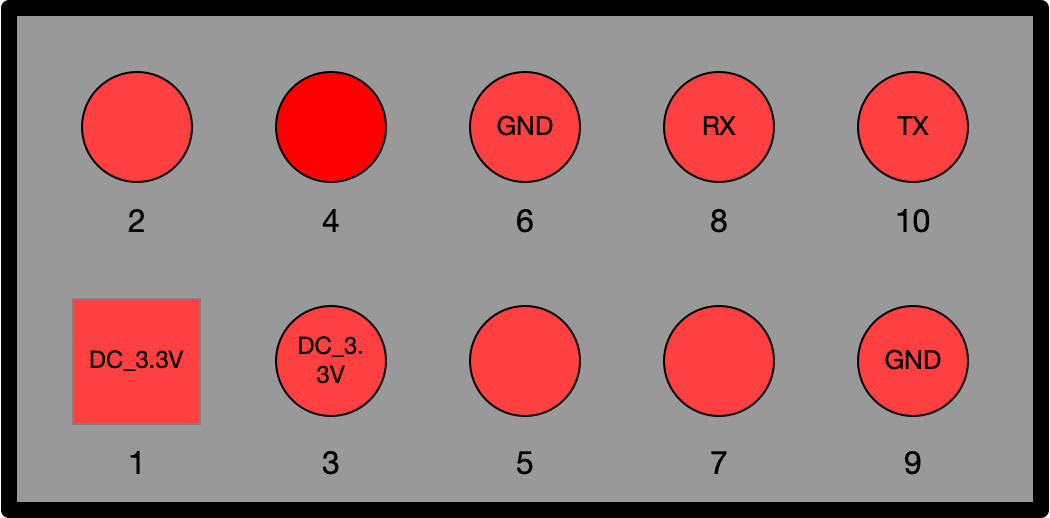
DEBUG接口说明:如需调试,请连接6、8、10引脚即可,2、4、5、7为内部单片机烧写程序使用,请勿连接!
章节七:扩展设备安装方式及配置说明
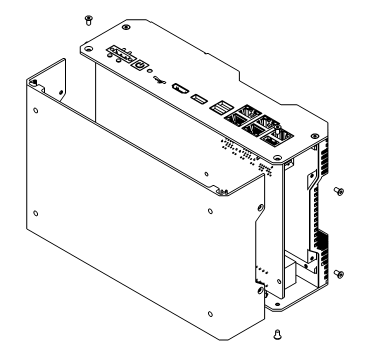
扩展设备安装方式
EVO Xavier提供M.2 M Key, mini PCIe等接口作为存储以及通讯扩展设备使用
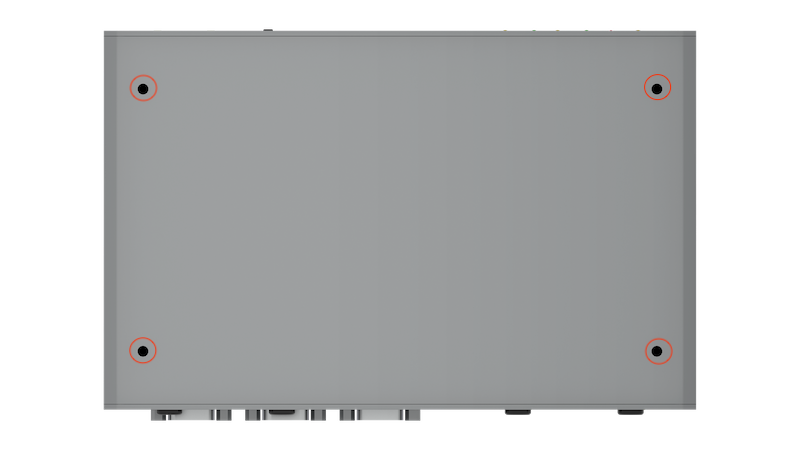
安装扩展设备时,需要先拧开如下8个螺丝从而打开EVO Xavier的底盖,如图所示:
|
|---|
| 图 EVO Xavier螺丝孔位置1 |
|
|---|
| 图 EVO Xavier螺丝孔位置2 |

|
|---|
| 图 EVO Xavier螺丝孔位置3 |
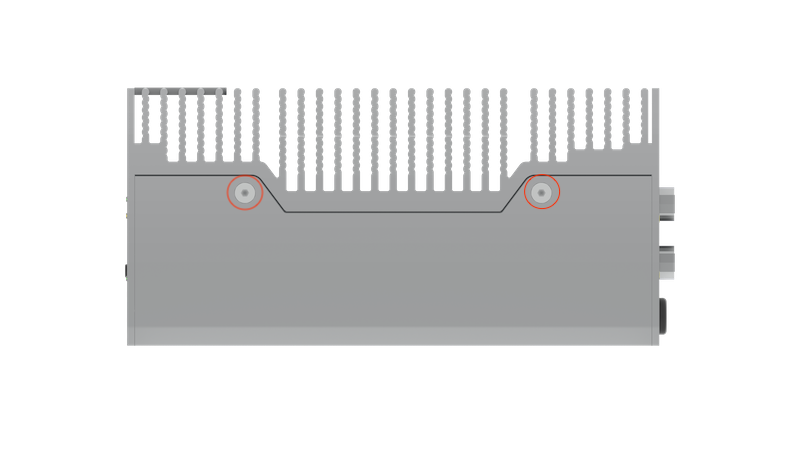
注意拧开左右侧板对称的4个螺丝
|
|---|
| 图 打开底盖 |
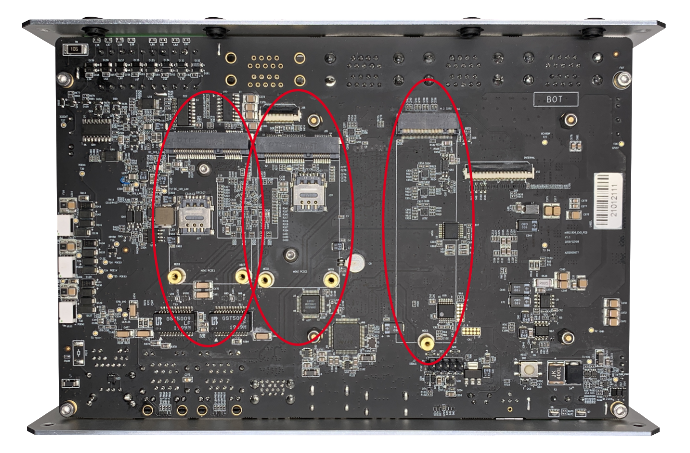
打开底盖后,可扩展接口位置如下图:
|
|---|
| 图 可扩展接口位置图 |
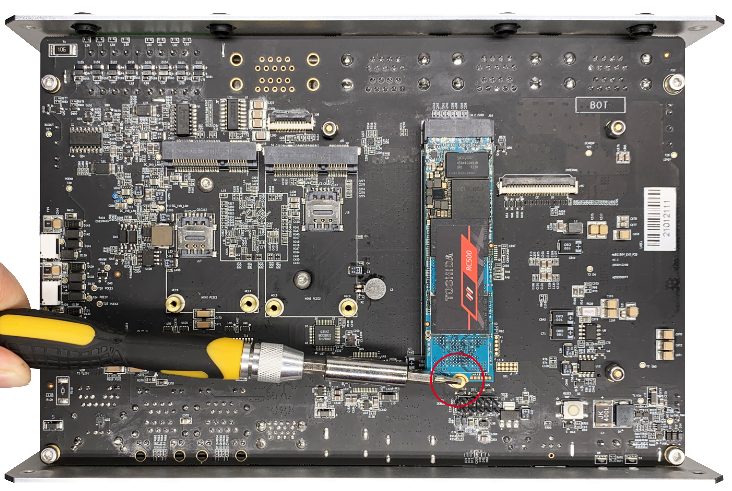
按照扩展需求,进行设备的安装,并用相应的螺丝固定扩展模块。注意如果需要安装mini PCIe接口的4G模块,请先将SIM卡插入到对应接口的Nano SIM卡槽中,再安装4G模块。
|
|---|
| 图 模块安装示意图 |
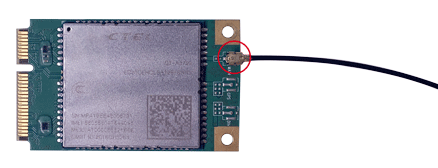
若采用WiFi及4G模块,需要安装天线以确保信号稳定。天线一端安装在模块上,另一端固定到EVO Xavier后面板的预留孔位上。
|
|---|
| 图 天线安装示意图1 |
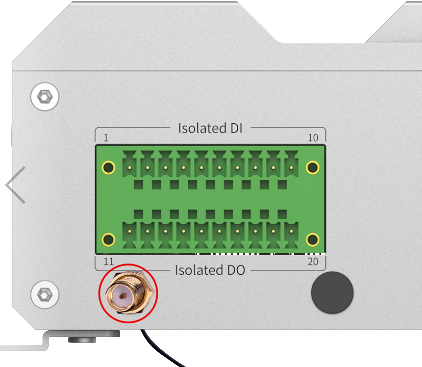
|
| 图 天线安装示意图2 |
扩展设备安装完毕后,请参考第一步的方式,将设备及固定螺丝恢复原位置,将设备重新装好以便后续使用
Mini PCIe 4G支持清单
序号 | 品牌 | 产品型号 | 支持方式 | 使用接口 | 模块功能 | 工作温度 | 规格 | 备注 |
|---|---|---|---|---|---|---|---|---|
| 1 | 移远 | EC20-CEHCLG-MINIPCIE-CB | 正式 | Mini PCIe | 4G | -40ºC 至 80ºC | 规格 全网通 速度 最大130Mbps (下载)/最大30Mbps (上传) | |
| 2 | 移远 | EC20-CEHC-MINIPCIE-CB | Beta | Mini PCIe | 4G | -40ºC 至 80ºC | 规格 全网通 速度 最大130Mbps (下载)/最大30Mbps (上传) | |
| 3 | 移远 | EC20-CEHCLG-MINIPCIE-C | Beta | Mini PCIe | 4G | -40ºC 至 80ºC | 规格 全网通 速度 最大130Mbps (下载)/最大30Mbps (上传) |
注:
- 正式支持:每次米文系统版本升级,会在米文设备上进行验证。
- BETA支持:米文调试过,但不会在每次米文系统版本升级中验证,如使用过程中需要进一步支持请联系对应的销售工程师或客户经理。
4G模块配置方法
米文所有标准产品中不包含4G模块,需要用户自行另配。请按照【扩展设备安装方式】的内容对SIM卡以及4G模块进行安装。请注意如果您使用的是物联网SIM卡,则会出现SIM卡与设备硬件绑定的问题,请提前与通讯供应商确认。
米文的系统镜像中,整合了相应4G模块驱动。安装好4G模块后系统会自动识别。查看/dev目录,会看到/dev/ttyUSB0~/dev/ttyUSB3,一共4个设备。
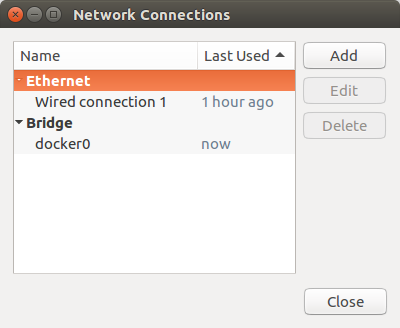
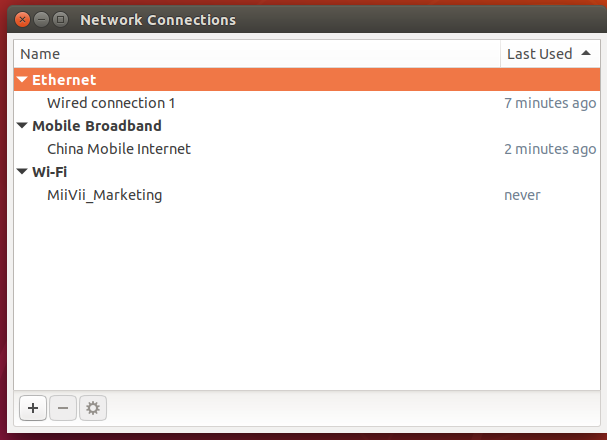
在桌面右上方网络连接图标中,找到Edit Connections,点击add,如图所示:
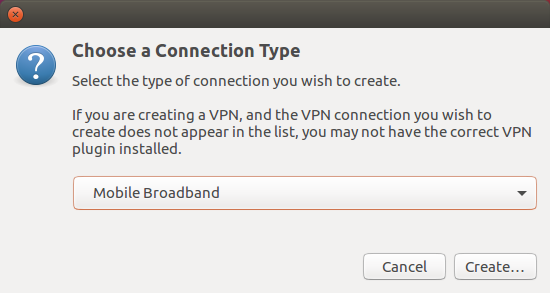
选择连接类型 Mobile Broadband
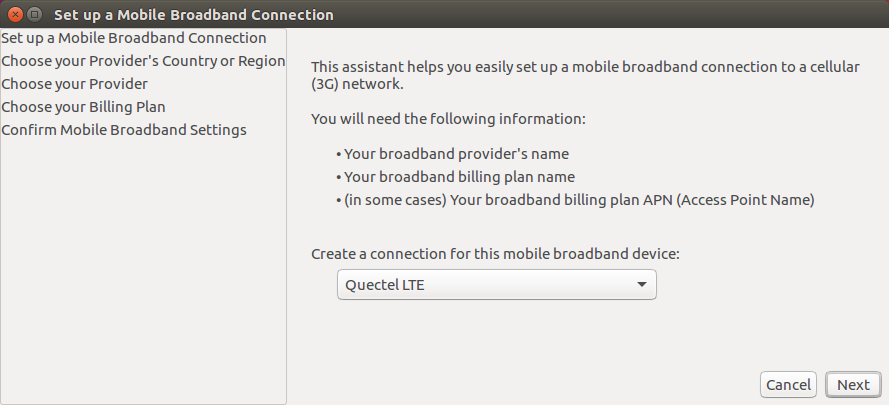
选择Next(选项Quectel LTE,Fibocom NL668 Modem,Android与Any device etc依据不同型号的4G模块显示不同信息,可直接点击Next)
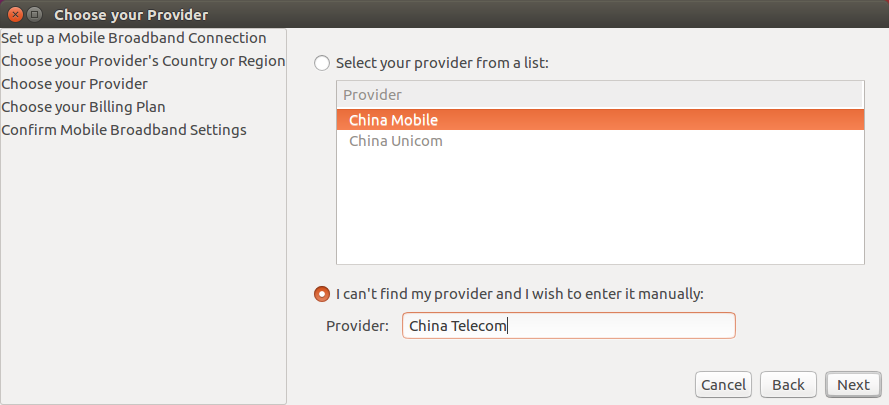
选择国家为China ,然后根据SIM卡选择运营商:中国移动是China Mobile,中国联通是China Unicom
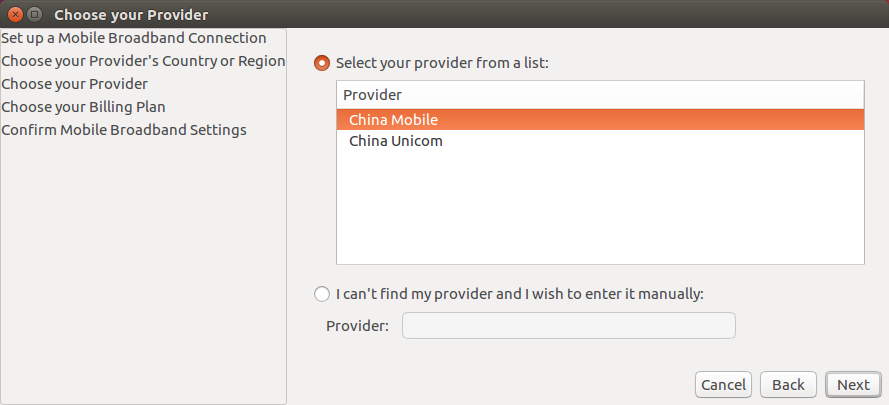
如果选择的运营商是中国电信,则点击手动新建运营商 China Telecom
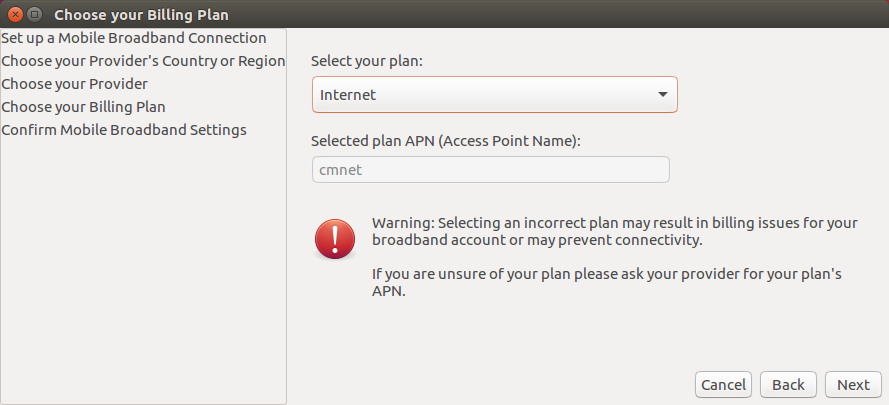
选择你的Plan
请根据SIM卡信息选择。移动选Internet,联通和电信选default
这里注意一下APN移动为cmnet,联通为3gnet,电信为ctnet
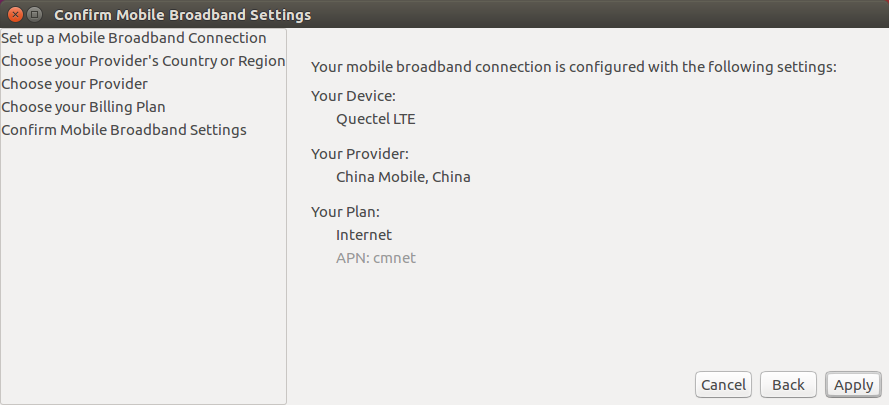
检查已创建的信息,如正确无误,则点击Apply
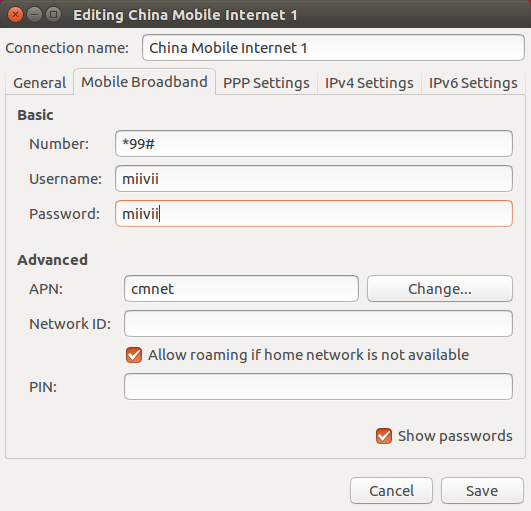
设定用户名和密码,点击save
网络创建完成后,在桌面右上方网络连接图标中选中新建的网络连接,就能够正常上网了。若需要4G网络开机自动连接设置,已移动为例,建立好连接文件China Mobile Internet后操作如下: 点击桌面上方网络连接图标,在下拉菜单中点击Edit Connections选项。在弹出的窗口中选中China Mobile Internet选项,点击下方设置图标
弹出的窗口中选择General选项,并勾选Automatically connect to this network when it is available选项
之后保存退出。重启米文设备,就可以在输入开机密码后自动重连4G网络

Mini PCIe WIFI支持清单
序号 | 品牌 | 产品型号 | 支持方式 | 使用接口 | 模块功能 | 工作温度 | 无线标准 | 规格 | 备注 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Complex | WLE900VX | 正式 | Mini PCIe | WIFI | -20ºC - 70ºC | Wifi802.11ac | WIFI速率 ≤1300Mbps | |
| 2 | Azurewave(海华) | AW-CB161H | 正式 | Mini PCIe | WIFI+蓝牙 | 0ºC - 70ºC | Wifi 802.11a/b/g/n/ac 蓝牙:4.0 | WIFI速率 ≤433.3Mbps |
注:
- 正式支持:每次米文系统版本升级,会在米文设备上进行验证。
- BETA支持:米文调试过,但不会在每次米文系统版本升级中验证,如使用过程中需要进一步支持请联系对应的销售工程师或客户经理。
WiFi配置方法
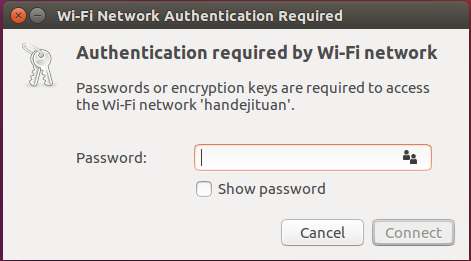
米文S2,S2Pro,EVO TX2 ,EVO TX2 GMSL2自带WiFi功能。米文Apex Xavier,Apex Xavier II系列,EVO Xavier, Lite NX,Lite Nano的WiFi功能由外接扩展模块提供,请按照【扩展设备安装方式】的内容对WiFi模块进行安装。请在开机Ubuntu系统桌面右上角网络连接图标中,找到要连接的WiFi名称并点击,然后在弹出的密码框输入密码并点击连接即可。
|
|---|
| 图 WiFi连接截图 |
扩展SSD硬盘使用
查看硬盘信息:
sudo fdisk -lu
|
|---|
| 图 查看硬盘信息页面截图 |

格式化硬盘:
sudo mkfs -t ext4 /dev/nvme0n1
|
|---|
| 图 格式化硬盘截图 |

查看硬盘UUID:
sudo blkid /dev/nvme0n1
|
|---|
| 图 查看硬盘UUID 截图 |

开机自动挂载硬盘的设置方法: 在/etc/systemd/system路径下创建一个systemd服务,用来开机自动执行挂载硬盘,如 :miivii_mount_ssd.service
#创建服务miivii_mount_ssd.service vim miivii_mount_ssd.service [Unit] Description=MIIVII specific script After=udev.service [Service] ExecStart=/etc/systemd/miivii_mount_ssd.sh [Install] WantedBy=multi-user.target
在/etc/systemd/路径下创建一个脚本,用来挂载硬盘,如: miivii_mount_ssd.sh
#创建服务脚本miivii_mount_ssd.sh vim miivii_mount_ssd.sh #!/bin/bash mount -o rw /dev/nvme0n1 /home/nvidia/workspace
为创建的脚本文件添加可执行权限
sudo chmod +x miivii_mount_ssd.sh
将挂载硬盘的服务设置为开机自启动
sudo systemctl enable miivii_mount_ssd.service
附录1 EVO XAVIER 使用方法
系统介绍
米文设备采用Ubuntu系统。默认用户名:nvidia; 密码:nvidia
烧写镜像
请访问米文技术论坛http://forum.miivii.com/来获取烧写工具,烧写工具说明及相应镜像。
开关机
开机:米文设备默认开机模式为上电自启动。插入电源,并将显示器通过HDMI接口与米文设备相连,开机画面如图所示:
|
|---|
| 图 开机画面 |

关机:长按POWER键/ON KEY按钮关机。或在命令行中执行$ sudo poweroff,完成软关机 重启:在命令行中执行$
搭载Jetson AGX Xavier的米文设备有多工作模式。可以通过右上角的NVIDIA绿色标志设置进行调整。 米文设备的默认模式为3: MODE_30W_ALL
|
|---|
| 图 设置图标 |
点击下拉菜单即可对米文设备的工作模式进行修改,工作模式的细节详见下表:
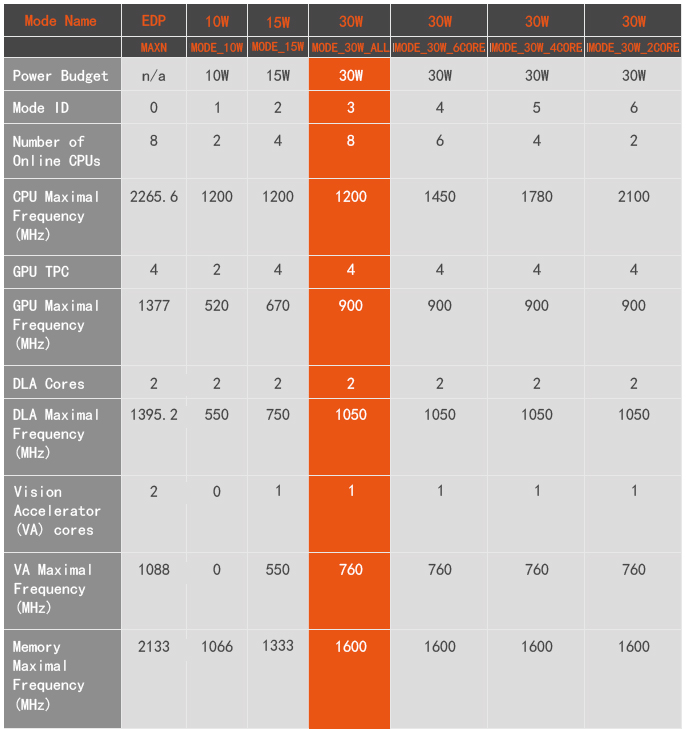
也可采用命令行调整:
#查看设备现在的模式 sudo nvpmodel -q verbose # 设定为某一模式 sudo nvpmodel -m <MODE ID> #获取在当前模式下的最佳表现 sudo jetson_clocks #查看详细信息 sudo jetson_clocks --show
异常处理
如在开发过程中出现异常情况,可先通过DEBUG串口打印log自行判断问题。具体操作如下:
第一步:根据【接口说明】部分中的信息,找到DEBUG接口的具体位置
第二步:用一根UART-USB转接线1,将DEBUG接口与上位机PC相连接
第三步:在上位机PC端,下载串口调试工具,将波特率调整为115200 Baud
第四步:在串口调试工具中抓取串口log以便分析异常问题
[1]:可根据【接口说明】部分中的信息,选择RS232-USB转接线或者TTL-USB转接线。
附录2
Jetpack 4.4版本及以下镜像烧录
Jetpack 4.5版本及以上镜像烧录
1.功能介绍
米文刷机工具,适用于米文系列产品。
米文刷机工具,是为了方便进行米文设备的烧写、克隆,小批量生产而提供的工具软件。
您可以通过X86架构PC作为烧写主机,给米文设备烧写米文动力官方镜像。在开发米文设备一段时间后,可以将现有设备镜像克隆来保存开发进度,并单台或小批量烧写到其他米文设备中。
核心功能
- 自动检测使用环境
- 自动检测最新镜像
- 内置镜像下载器,无需手动下载镜像
- 支持批量烧写
- 支持镜像克隆(但要注意Clone后再烧写需要使用同一bootloader版本)
2.准备软件硬件
2.1. 烧写主机准备
需要将烧写主机与米文设备连接方能烧写镜像。烧写主机推荐配置如下:
● CPU采用X86架构的Intel酷睿系列处理器
● 内存8GB ddr3及以上
● 空余硬盘容量40G 及以上
● 系统为Ubuntu Linux x64 v16.04或v18.04
2.2. 烧写软件环境准备
● sudo apt install python2.7 python3 python
2.3. 准备米文烧写工具和米文设备镜像
2.3.1.刷机工具安装
- 准备PC主机,系统为:Ubuntu 16.04或者Ubuntu 18.04
安装key
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 05BE38FE8ADA7CD12E3281B52FC7A8453C3B8F24
在本地 ubuntu 系统中添加源
sudo sh -c 'echo "deb http://upgrade.miivii.com/miiviitools/ mvtools main" > /etc/apt/sources.list.d/miivii-l4t-apt-source.list'
手动更新
sudo apt update
apt-get 安装 刷机工具 Deb 包
sudo apt-get install miivii-ftool
- 安装完成后(在18.04系统中点击Show Applications或者在16.04系统中点击Search Your Computer)会发现如下快捷方式

- 双击快捷方式,输入密码:您的sudo密码。
2.4. 准备硬件
● 米文设备及电源, USB 数据线
3.操作
3.1. 硬件连接
● 通过 USB 数据线将米文设备烧写口与烧写主机相连;
● 按住米文设备的RECOVERY按钮,之后给米文设备上电开机,进入FORCE_Recovery烧写模式。
3.2软件使用
3.2.1. 镜像烧写
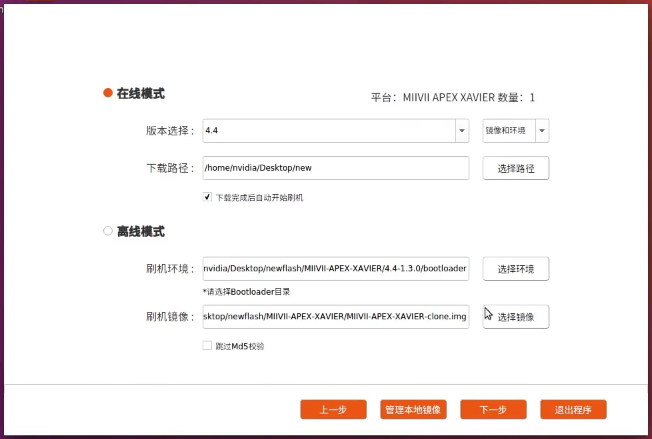
3.2.1.1 在线模式镜像烧写
● 点击“在线模式”复选框,选择Jetpack版本及下载路径,并点击下一步,开始下载选择版本当前最新的刷机环境及设备镜像
● 这里需要选择下载完成后是否自动开始刷机,选择自动后,下载完成后会自动解压、校验、刷机
● 下载速度取决于所在环境的网速,一般可达5M/s
● 开始刷机后通常需要15分钟以上完成,请耐心等待
3.2.1.2 离线模式镜像烧写
● 点击“离线模式”复选框,选择已经下载好的刷机环境及设备镜像,并点击下一步直接开始烧录。
3.2.2. 镜像克隆
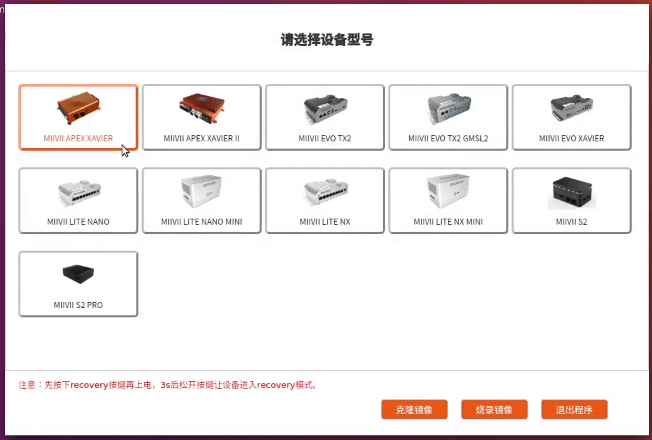
● 将打算克隆的米文设备按照3.1的方法进入FORCE_Recovery模式,打开烧写工具
● 点击【输入上位机密码】按钮,输入当前烧写主机的开机密码
● 点击【克隆镜像】按钮,进入克隆操作
● 修改克隆文件保存在烧写主机中的路径和名称*,并点击开始克隆
注:文件存储路径中不能有中文或特殊字符,且再烧写镜像需要使用同一bootloader版本
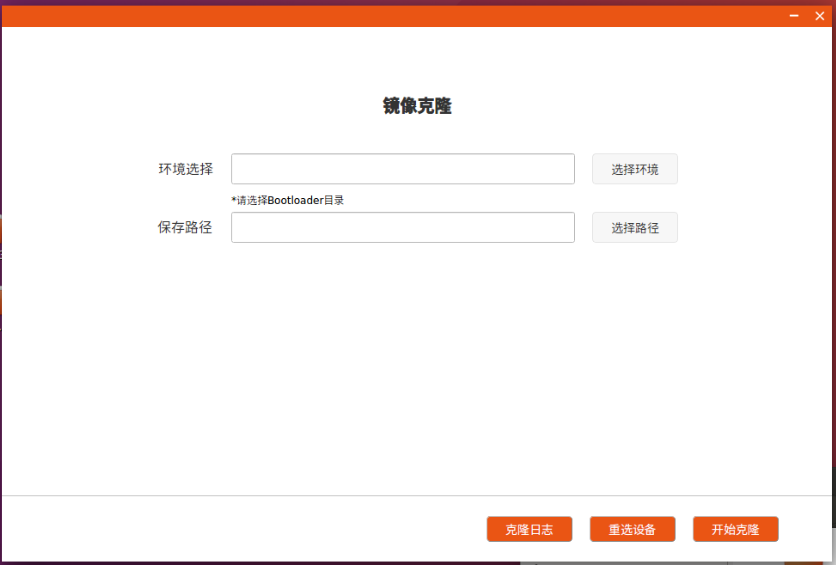
● 镜像克隆通常需要30分钟以上才能完成:
● 克隆完成,会生成克隆镜像与MD5文件,再次烧写请按照3.2.1步骤进行操作
注:如在镜像烧写,克隆过程中遇到问题,请联系米文动力售后邮箱寻求帮助:
附1. 烧写问题自检
如果遇到烧写问题,请先按照如下条目进行自检:
● 检查是否在烧写工具左上角输入了上位机开机密码
● 检查是否进入到Recovery模式,可以通过lsusb命令鉴定
● 检查Micro USB、双Type A线缆质量是否达标,是否只是用于充电的双芯线
● 检查上位机,是否为X86-64架构台式机,笔记本。(服务器,嵌入式设备,虚拟机等其他设备暂不支持)
● 检查上位机系统是否为 Linux 1604 1804
● 检查磁盘格式,烧写主机的磁盘格式推荐为EXT4
● 检查上位机容量是否足够
● 镜像和烧写工具存储路径中不能有中文或其他特殊字符
系统在线升级(OTA)的使用说明
概述
系统在线升级,通常又是OTA,是米文针对所有设备提供的软件服务。
即可以不进行刷机来更新系统固件。
从Jetpack 4.5开始,所有的米文设备都支持系统在线升级。
使用方式
方法一(推荐):使用MIIVII SETTINGS进行版本升级 ;
- 在设备上打开浏览器输入http://127.0.0.1:3000,或者远程PC浏览器上输入http://<device ip>:3000
- 使用系统登录账号登录到MIIVII SETTINGS界面;
- 选择系统升级功能,点击“检查更新”检查是否有新版本;

- 检测到有升级版本时,可以点击“系统升级”来升级安装包

- 完成升级后系统会记录升级时间,可以查看该时间的升级记录

- 升级完成后重启系统以确保升级内容生效
方法二:使用命令行进行升级或者升级指定安装包
使用命令行进行升级
执行下面命令更新源
sudo apt update
执行下面命令升级系统
sudo apt upgrade -y
升级完成后重启系统以确保升级内容生效
升级指定安装包
执行下面命令升级指定安装包(以更新websettings 1.4.0版本为例)
sudo apt install -y miivii-websettings=1.4.0
附录3
MIIVII SETTINGS的使用说明(适用于Jetpack 4.5版本及以上)
简介
MIIVII SETTINGS(又称米文设置),是米文为了简化对于设备进行设置,而提供的工具。
提供诸如系统状态检测、远程访问、远程登陆等等功能。
访问方法:
方法1-本机桌面快捷方式访问:
- 双击桌面快捷方式“MIIVII WEBSETTINGS” ,即可通过浏览器打开应用
- 要求登录本机的用户名密码具有sudo权限。无sudo权限用户无法使用
方法2-本机浏览器访问:
- 打开浏览器
- 输入 http://127.0.0.1:3000
- 要求用户名密码具有sudo权限,无sudo权限用户无法登陆。
方法3-局域网浏览器访问:
- 打开PC机浏览器
- 输入 “设备的局域网IP + 端口号”,端口号为3000 。例如: http://192.168.1.100:3000
- 要求用户名密码具有sudo权限,无sudo权限用户无法登陆。
功能说明
中英文界面切换
页面右上角有  界面切换按钮,点击按钮,可以实现中英文界面的切换。
界面切换按钮,点击按钮,可以实现中英文界面的切换。
(中英文切换功能从V2.5.x及以后版本开始提供)

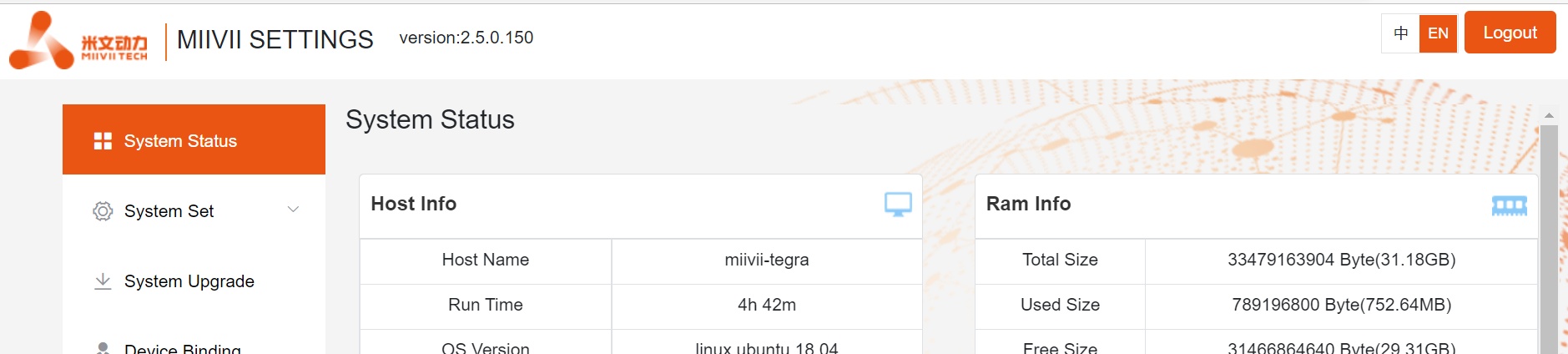
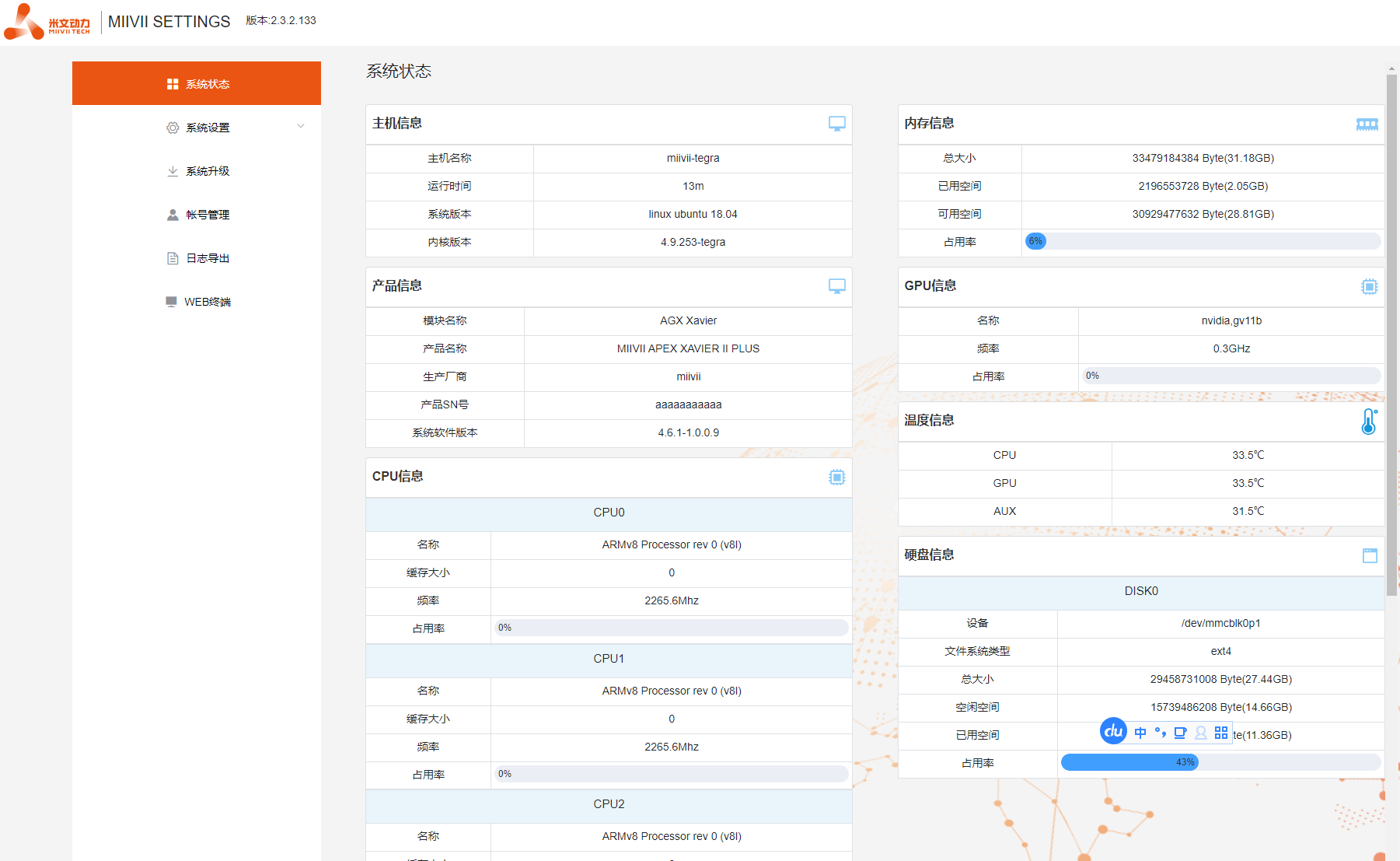
系统状态
用于查看当前系统的各种状态信息,例如CPU占比、内存占比,存储占比等基本信息。
- 点击左侧菜单栏“系统状态”即可进入页面。
也可以通过命令行查看系统版本(局域网访问时,可使用“WEB终端“功能”):
cat /etc/miivii_release APEX 4.2.2-1.5.0
系统设置
对系统基本功能进行设置,如系统授时设置等等。
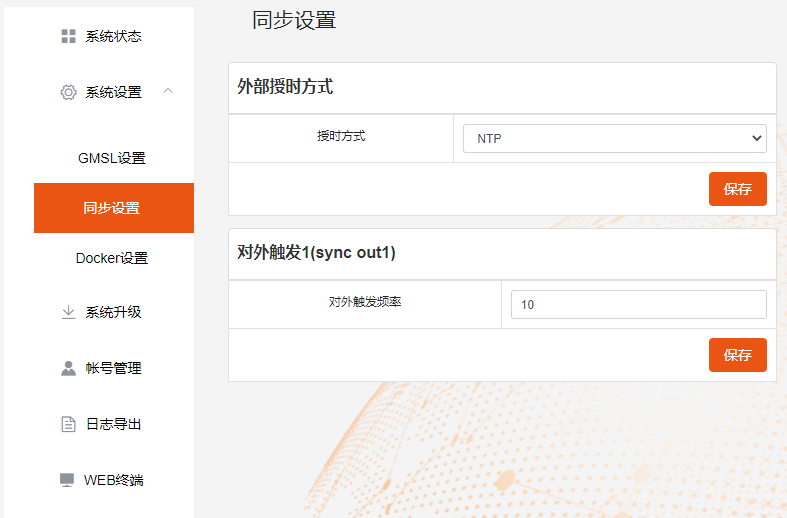
同步设置(系统授时设置)
点击左侧菜单栏“系统设置-同步设置”即可进入页面。
选择外部授时方式: NTP/GPS/NONE
- NTP为默认模式。NTP网络授时模式,此时设备接入网络,被NTP服务授时。设备可作为同步源,对传感器进行授时和同步;
- GPS为GPS外界授时模式,此时设备外接GPS,被GPS授时。设备可作为同步源,对传感器进行授时和同步
- None为不同步模式,此时设备不被外界授时,但可以作为同步源。
设置对外触发(SYNC OUT):
- 调节Sync out输出频率,注意此处并非是GMSL的频率。
- 设备Apex Xavier, Apex Xavier II, Apex Xavier II+系列, 包含同步功能设置;
- 设备EVO Xavier, EVO Xavier II, EVO TX2 GMSL2, S2Pro包含同步功能设置;
- 设备EVO TX2 ,S2、Lite线产品都不包含同步功能设置;
配置文件路径:
/opt/miivii/config/sync/sync.cfg
- 授时模式是通过修改其中"sync_type:X" 的X数值来实现。 0:GPS外界授时模式 1:NTP网络授时模式 2:不同步模式
cat /opt/miivii/config/sync/sync.cfg sync_out_freq:25 sync_type:2 /* note: sync_out_freq---the frequency is 25 for sync out time sync_type---0 is for GPS calibrate time 1 is for SYS calibrate time 2 can not calibrate time
系统升级
米文提供设备系统的OTA升级。
- 点击左侧菜单栏“系统升级”即可进入页面。
- 点击”检查更新“,如果有更新,点击确定。

账号管理
米文提供EdgeService云边服务,开启云边服务需要绑定设备。
- 点击左侧菜单栏“账号管理”即可进入页面。
- 遵照页面提示完成设备绑定即可。

日志导出
系统的运行日志存储在 /var/log/中的日志中,”日志导出“功能提供 打包并下载到本地的功能。
- 点击左侧菜单栏“账号管理”即可进入页面。
- 点击”导出系统日志“即可完成。

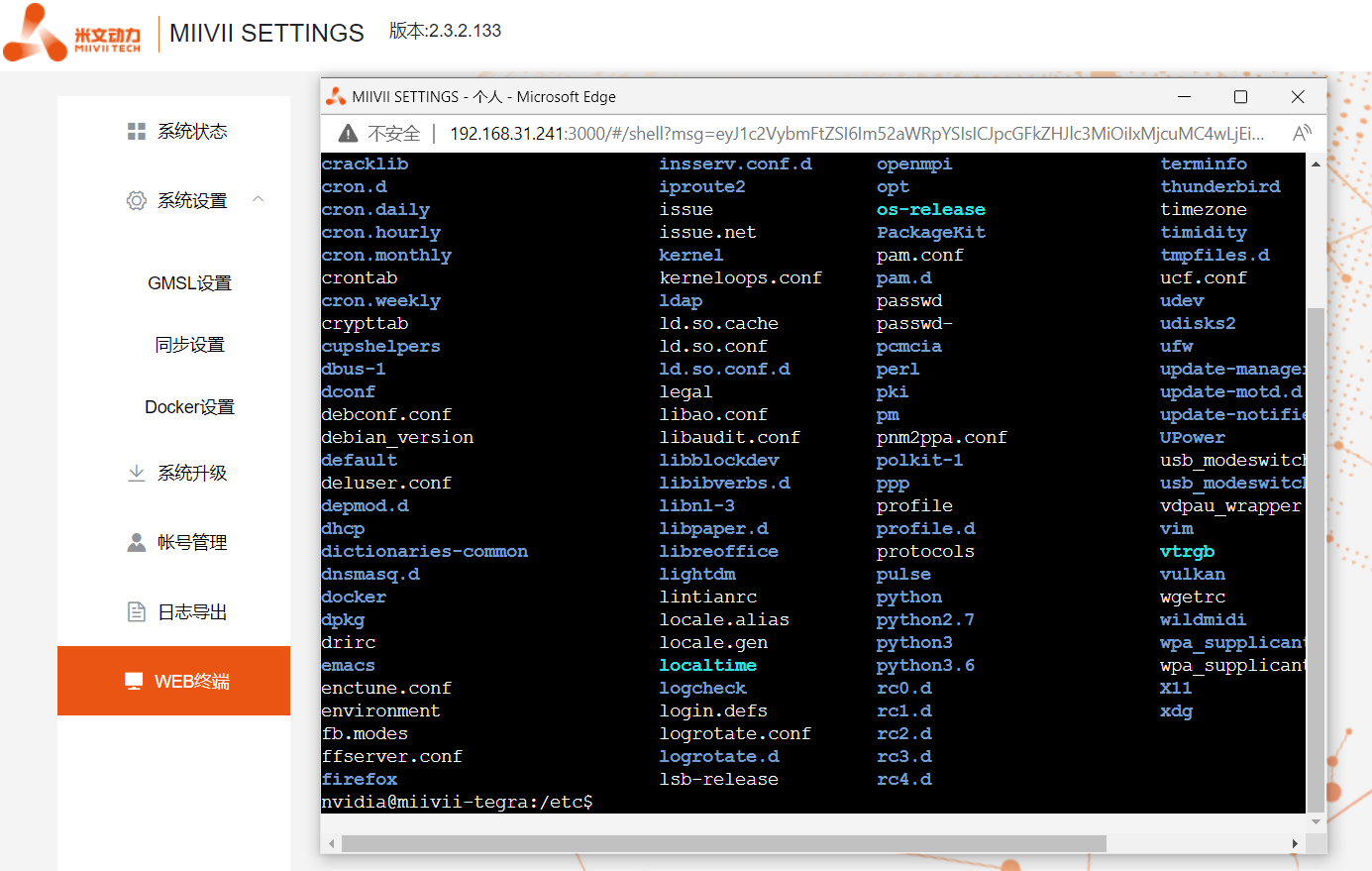
WEB终端
米文设置提供了通过WEB的远程终端功能
- 点击左侧菜单栏“WEB终端”即可进入页面。
- 点击”打开终端“即可打开WEB终端(如下图)。

附录4 软件Release Note
| 产品名称 | 更新时间 | 系统版本 | 更新内容 | 备注 |
|---|---|---|---|---|
| MIIVII EVO XAVIER | 2022/09/09 | 4.4-1.3.0.12 | 功能变更: 系统默认POE关闭,如需使用POE需要手动打开此功能 | 支持镜像刷机升级,不支持OTA升级 |
| 2022/09/05 | 4.6.1-4.3.0.43 | 功能变更: 系统默认POE关闭,如需使用POE需要手动打开此功能 | 支持镜像及OTA升级 | |
| 2022/09/02 | 4.5-3.3.1.7 | 功能变更: 系统默认POE关闭,如需使用POE需要手动打开此功能 | 支持镜像及OTA升级 | |
| 2022/0/06 | 4.6.1-4.2.0.40 | 问题修复:
| 支持镜像及OTA升级 | |
| 2022/06/14 | 4.6.1-4.1.0.34 | 问题修复:
| 支持镜像及OTA升级 | |
| 2022/02/15 | 4.6.1-4.1.0.30 | 功能变更:
| 支持直接烧录镜像升级 支持4.5版本镜像OTA升级到此版本 | |
| 2021/07/15 | 4.5-3.2.0.20 | 功能变更:
问题修复:
| 基于4.5-3.1.0进行OTA升级 | |
| 2021/03/30 | 4.5-3.1.1 |
|